Autoware
Autoware is open-source software for autonomous driving systems built on the Robot Operating System (ROS) which is also open-source. It provides a full range of functions required for autonomous driving, including localization, object detection, route planning, and vehicle control, enabling commercial use in a broad range of vehicles and applications.
As a premium member of the Autoware Foundation, an international non-profit organization dedicated to the international standardization of self-driving mobility, eSOL participates in the formulation of technological strategies as well as in the commercial deployment of Autoware software. This participation in the project dates back to the earliest days of Autoware and has included joint vehicle testing and demonstrations using the eMCOS® scalable real-time OS and many-core processors. eSOL also supports product rollout and commercialization by supplying engineering services to companies that use Autoware and ROS.
eMCOS Scalable Real-Time OS
eMCOS is the world’s first commercially available real-time OS offering scalable support for everything from microcomputers to multicore and manycore processors and multi-chip systems. It features a multikernel (distributed microkernel) architecture that is fundamentally different than that used on traditional real-time OSes, as well as eSOL’s patented semi-priority-based scheduling algorithm. Along with high performance and scalability, these technologies deliver the real-time capabilities that are essential in embedded systems.
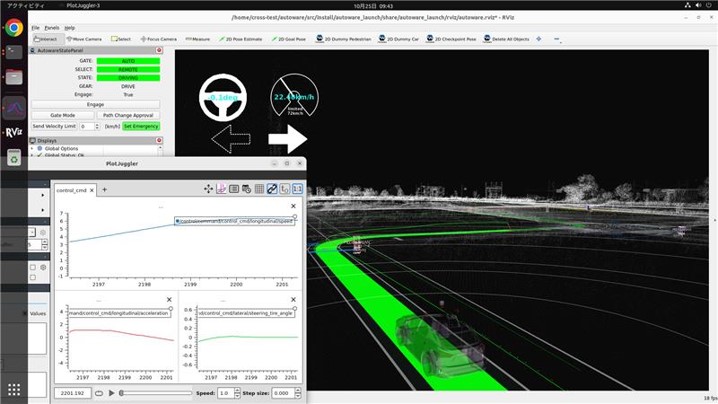
Example eMCOS Application: Autonomous Driving Platform
Autonomous driving platform equipped with Autoware running with "ROS on eMCOS"
While Autoware is developed on the open-source Linux OS, replacing Linux with eMCOS delivers the high levels of real-time performance and reliability needed for commercial applications. Since eMCOS also supports the POSIX API, the porting effort can be kept to a minimum.
Using eMCOS provides the following benefits for developers:- Enables use of Autoware functions on the many different embedded processors used in commercial products
- Enhanced system-level safety and reliability through the appropriate integration and segregation of mission-critical and other processing
- Reduced costs for verification of core software, including the OS, communication middleware, and toolchain. The availability of technical support for this core software also helps developers focus on the applications that add value to their products
- Efficient interoperation with other widely used automotive software platforms such as AUTOSAR